Transformable quad-bi copter: Design, modeling, and control of a UAV with mid-flight transformation capability for enhanced reachability in challenging terrains.
Iterative Learning Control (ILC) with Disturbance Observer (DOB): Robust estimation and suppression of disturbances in UAVs using learning among systems with mismatched dynamics.
Pendulum-on-UAV Control: Developed a novel algorithm to control oscillations of an unactuated pendulum attached to a quadrotor, achieving high repeatability in target tasks.
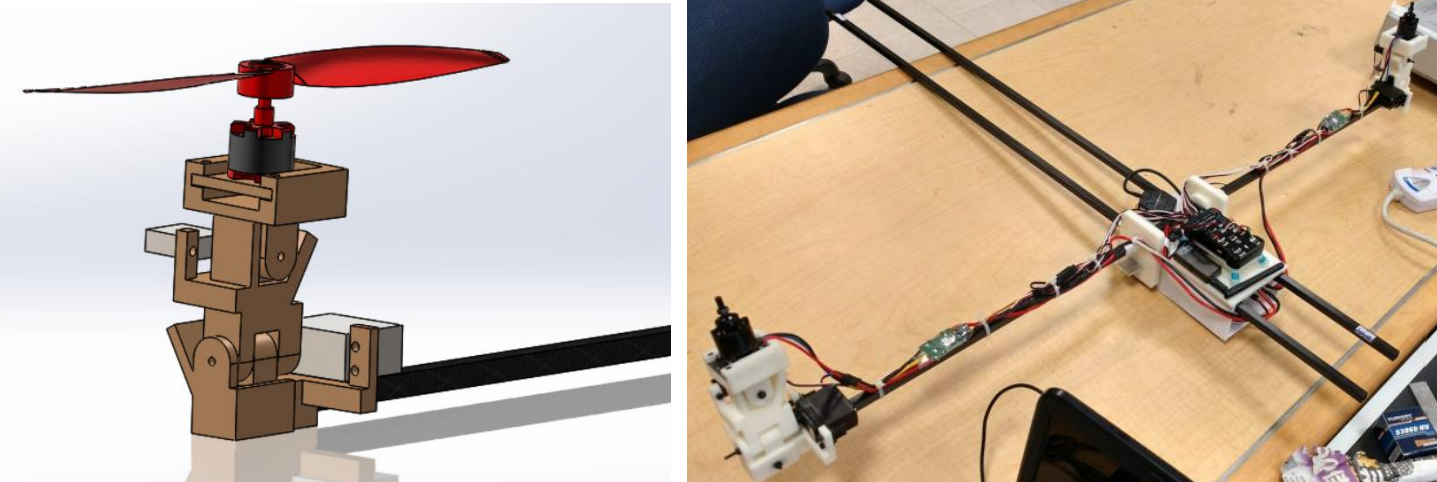
VTOL Fixed-Wing UAV: Designed and manufactured a mechanism for a vertical takeoff and landing UAV with a bicopter mechanism, enabling smooth transition between hover and fixed-wing modes.
IEEE/ASME TMECH
Patent Pending
MECC 2024
IEEE RAL
Springer
2022 - 2026
2020 - 2022
2018-2020
2014-2018
Indian Institute of Technology Gandhinagar (IIT Gandhinagar)
August 2022 - Present
- Developed Iterative Learning Control (ILC) with Disturbance Observer (DOB) for estimating and suppressing the disturbances via learning among systems with mismatched dynamics.
- Implemented the learning framework on quadrotor Unmanned Aerial Vehicles (UAVs). Used system identification experiments, mathematical modelling, Vicon motion capture cameras, Raspberry Pi, Pixhawk Flight Controller, ROS etc. for implementation. The learning framework reduced the disturbance estimation and trajectory tracking error by about 80-90% using the novel method.
- Developed iterative learning control algorithm for estimating the road profile using connected vehicles equipped with active suspension. Implemented the framework in simulations and Quansar experimental setup (A collaboration project with Michigan State University with NSF grant).
- Developed a novel 7 DOF UAV with capability to transform mid-flight using a servo motor to enhance reachability of the UAVs in difficult-to-access terrain.
- Designed Gazebo based simulation model to test new control algorithms and to accurately tune the controller parameters for the new hardware without risking damage to the vehicl
- Developed and performed experiments with a prototype to test the concept of the new transformable UAV design.
December 2020 - June 2022
- Designed and implemented robust controller with failsafe algorithms using ROS for precise trajectory tracking of the aerial robotic platform (i.e. quadrotor).
- Designed and implemented a controller to control the oscillations of an unactuated pendulum attached to the quadrotor. Designed algorithm to gradually store the kinetic energy in the pendulum by increasing the oscillations and hit a plastic ball so that it passes through a target hoop; Achieved 90% repeatability.
- Designed and developed gimbal configuration based attitude testing platform to test the novel control algorithms for quadrotor UAVs. The setup also provided a ground truth using rotary encoders to test various attitude estimation and sensor fusion algorithms.
May 2017 - July 2017
- Designed a mechanism to precisely control the attitude and to enable the transition between hover mode and fixed-wing mode of the Vertical Takeoff and Landing fixed-wing UAV. Optimized the design by achieving coinciding thrust and rotation axes and compactly packing the mechanism. Ensured the strength requirement with stress and deformation analysis in ANSYS during various iterations.
- Manufactured the final mechanism using additive manufacturing and assembled the bicopter components such as Pixhawk flight controller, ESC, BLDC Motors etc. and performed ground tests to evaluate the roll/pitch/yaw control.
Address
CtrlRobot Lab, Texas A&M University, College Station, TX, USA
Phone
+1 Seven-One-Six 295-Three-414